Note
Go to the end to download the full example code.
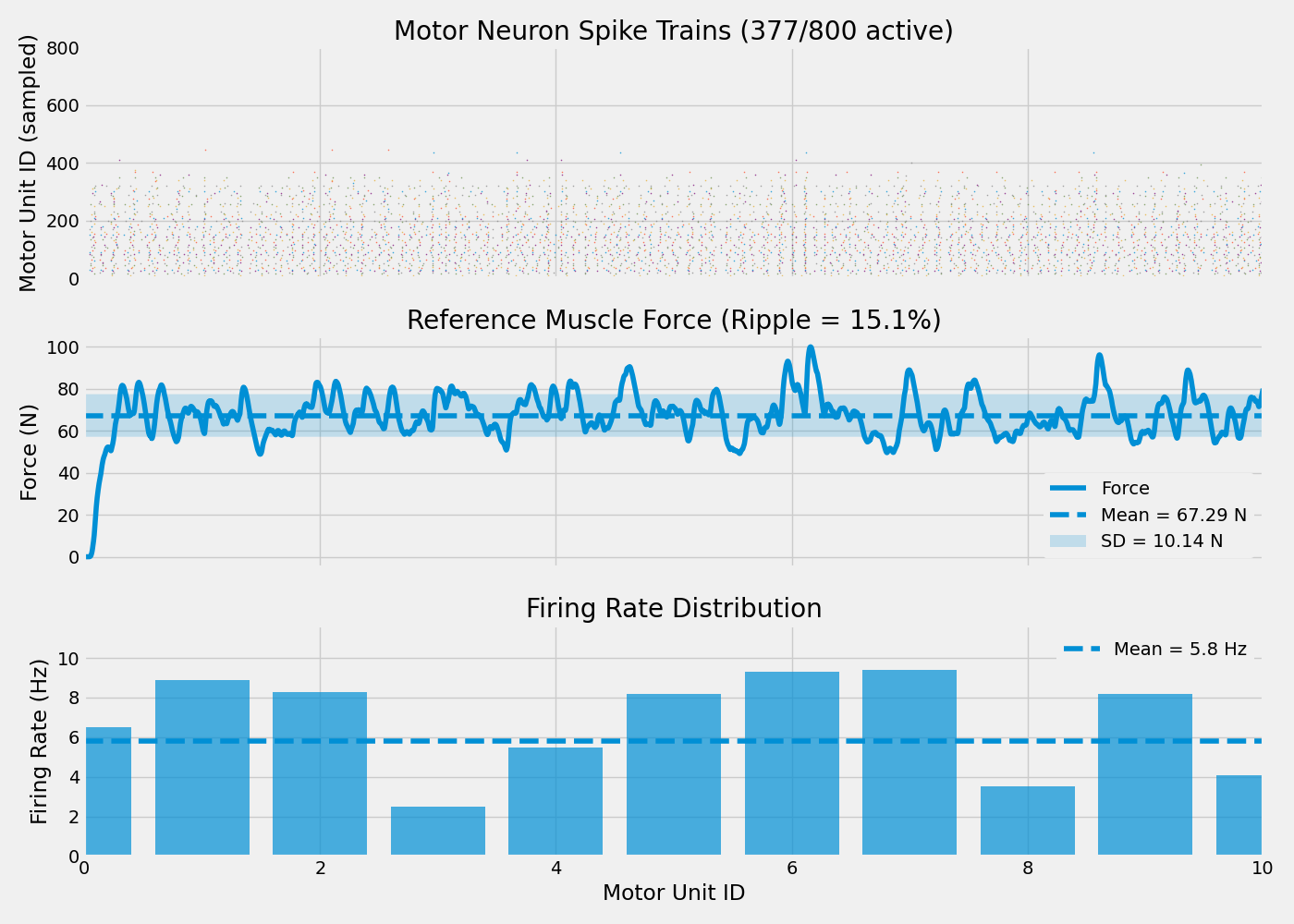
Compute Reference Force with Constant Drive#
This example computes the reference muscle force using constant descending drive. This force is used as the target for optimizing the oscillating drive DC offset in Phase 3.
Note
Purpose: Establish force baseline using Watanabe network parameters
800 motor neurons
400 descending drive neurons
30% connectivity
Constant drive frequency (configurable, default 40 Hz)
Poisson process (order 1)
Configuration: Adjust DD_DRIVE_HZ at the top of the script (default: 40 Hz)
Output: Reference force saved to results/watanabe_optimization/force_reference.json
MyoGen Components Used:
AlphaMN__Pool: Pool of 800 alpha motor neurons with exponentially distributed recruitment thresholds. Each neuron is a biophysically detailed NEURON model with soma, dendrites, and ion channels.DescendingDrive__Pool: Pool of 400 “descending drive” neurons that generate Poisson spike trains. These represent cortical/brainstem input to motor neurons.poisson_batch_size=1creates order-1 (renewal) Poisson processes.Network: Container that manages populations and synaptic connections between them. Supports probabilistic connectivity (connect()) and external input (connect_from_external()).RecruitmentThresholds: Generates recruitment threshold distribution following Fuglevand/DeLuca models. Themode="combined"blends exponential and linear distributions.ForceModel: Converts motor neuron spike trains to muscle force using Fuglevand’s twitch model. Each motor unit has amplitude and contraction time determined by recruitment threshold.
Workflow Position: Step 1 of 6 - Run this first to establish baseline force.
Next Step: Run 02_optimize_oscillating_dc.py to find DC offset for Phase 3.
Import Libraries#
import json
import os
os.environ["MPLBACKEND"] = "Agg"
if "DISPLAY" in os.environ:
del os.environ["DISPLAY"]
import warnings
from pathlib import Path
import matplotlib.pyplot as plt
import numpy as np
import quantities as pq
from neo import Block, Segment, SpikeTrain
from neuron import h
from myogen import get_random_generator
from myogen.simulator import RecruitmentThresholds
from myogen.simulator.core.force.force_model import ForceModel
from myogen.simulator import Network
from myogen.simulator.neuron.populations import AlphaMN__Pool, DescendingDrive__Pool
from myogen.utils.helper import calculate_firing_rate_statistics
from myogen.utils.nmodl import load_nmodl_mechanisms
warnings.filterwarnings("ignore")
plt.style.use("fivethirtyeight")
USER CONFIGURATION - Adjust these parameters as needed#
# Constant descending drive frequency (Hz)
# This is the baseline drive for Phase 1 (constant stimulation)
# - Watanabe original: 65 Hz
# - Lower values (e.g., 40 Hz): lower force output, fewer recruited units
# - Higher values (e.g., 80 Hz): higher force output, more recruited units
DD_DRIVE_HZ = 40.0
Define Simulation Parameters#
# Watanabe network parameters (original specification)
N_MOTOR_UNITS = 800 # Watanabe specification
N_DD_NEURONS = 400 # Watanabe specification
DD_CONNECTIVITY = 0.3 # Watanabe specification (30%)
SYNAPTIC_WEIGHT = 0.05 # DD→MN synaptic weight (µS)
# Simulation parameters
SIMULATION_TIME_MS = 10000.0 # 10 seconds for steady-state force
TIMESTEP_MS = 0.1 # Integration timestep (ms)
# Force scaling (convert normalized force to Newtons)
MAX_FORCE_N = 100.0 # Maximum voluntary contraction force (N) - typical for finger flexors
# File paths - Watanabe-specific directory
try:
_script_dir = Path(__file__).parent
except NameError:
_script_dir = Path.cwd()
RESULTS_DIR = _script_dir / "results" / "watanabe_optimization"
RESULTS_DIR.mkdir(exist_ok=True, parents=True)
print(f"\nComputing Reference Force with {DD_DRIVE_HZ:.1f} Hz Constant Drive (Watanabe Network)")
print("=" * 60)
print(f"Motor neurons: {N_MOTOR_UNITS}")
print(f"DD neurons: {N_DD_NEURONS}")
print(f"Connection probability: {DD_CONNECTIVITY:.1%}")
print(f"Drive frequency: {DD_DRIVE_HZ:.1f} Hz (constant)")
print("Process type: Poisson (batch size: 1)")
print("=" * 60 + "\n")
Computing Reference Force with 40.0 Hz Constant Drive (Watanabe Network)
============================================================
Motor neurons: 800
DD neurons: 400
Connection probability: 30.0%
Drive frequency: 40.0 Hz (constant)
Process type: Poisson (batch size: 1)
============================================================
Load NEURON Mechanisms and Setup Network#
MyoGen uses NEURON as its simulation engine. Before creating any neurons, we must load the compiled NMODL mechanisms (ion channels, synapses, etc.).
load_nmodl_mechanisms()
h.secondorder = 2 # Crank-Nicolson integration (2nd order accurate, stable)
# Create recruitment thresholds for 800 neurons
# ---------------------------------------------
# Recruitment thresholds determine:
# 1. Which motor units activate first (low threshold = low force, recruited early)
# 2. Motor unit properties (twitch amplitude, contraction time)
#
# Parameters:
# - recruitment_range__ratio=100: Largest MU has 100x threshold of smallest
# - mode="combined": Blends Fuglevand exponential + DeLuca linear distributions
# - deluca__slope: Controls steepness of threshold curve
recruitment_thresholds, _ = RecruitmentThresholds(
N=N_MOTOR_UNITS,
recruitment_range__ratio=100,
deluca__slope=5,
konstantin__max_threshold__ratio=1.0,
mode="combined",
)
# Create motor neuron pool
# ------------------------
# AlphaMN__Pool creates N biophysically detailed motor neurons.
# Each neuron has:
# - Soma with Hodgkin-Huxley-style channels
# - Dendrites for synaptic input
# - Properties scaled by recruitment threshold (input resistance, rheobase)
#
# The config_file specifies morphology and channel parameters.
motor_neuron_pool = AlphaMN__Pool(
recruitment_thresholds__array=recruitment_thresholds,
config_file="alpha_mn_default.yaml",
)
# Create descending drive pool with Poisson process (Watanabe)
# ------------------------------------------------------------
# DescendingDrive__Pool creates "virtual" neurons that generate spike trains
# at a specified rate. They don't have membrane dynamics - just Poisson processes.
#
# Parameters:
# - process_type="poisson": Renewal Poisson process
# - poisson_batch_size=1: Order-1 (memoryless) - Watanabe specification
# Higher values create more regular spike trains (order-k gamma process)
descending_drive_pool = DescendingDrive__Pool(
n=N_DD_NEURONS,
timestep__ms=TIMESTEP_MS * pq.ms,
process_type="poisson",
poisson_batch_size=1, # Order 1 Poisson (Watanabe specification)
)
Build Network#
The Network class manages populations and connections between them. It handles the complexity of creating synapses in NEURON.
network = Network({"DD": descending_drive_pool, "aMN": motor_neuron_pool})
# Connect DD → aMN with 30% probability (Watanabe specification)
# --------------------------------------------------------------
# This creates SHARED input: multiple motor neurons receive spikes from
# the same DD neurons, creating correlated activity across the pool.
#
# With probability=0.3, each motor neuron connects to ~30% of DD neurons
# (~120 connections), while each DD neuron projects to ~30% of motor neurons.
network.connect(
source="DD",
target="aMN",
probability=DD_CONNECTIVITY,
weight__uS=SYNAPTIC_WEIGHT * pq.uS,
)
# External input to DD population
# --------------------------------
# Creates NetCon objects that allow us to deliver events to DD neurons.
# In the simulation loop, we'll use these to trigger spikes based on
# the drive signal.
network.connect_from_external(source="cortical_input", target="DD", weight__uS=1.0 * pq.uS)
dd_netcons = network.get_netcons("cortical_input", "DD")
Setup Spike Recording#
mn_spike_recorders = []
for cell in motor_neuron_pool:
spike_recorder = h.Vector()
nc = h.NetCon(cell.soma(0.5)._ref_v, None, sec=cell.soma)
nc.threshold = 50
nc.record(spike_recorder)
mn_spike_recorders.append(spike_recorder)
Generate Drive Signal (65 Hz constant)#
time_points = int(SIMULATION_TIME_MS / TIMESTEP_MS)
drive_signal = np.ones(time_points) * DD_DRIVE_HZ + np.clip(
get_random_generator().normal(0, 1.0, size=time_points), 0, None
)
Run Simulation#
h.load_file("stdrun.hoc")
h.dt = TIMESTEP_MS
h.tstop = SIMULATION_TIME_MS
# Initialize voltages
for section, voltage in zip(*motor_neuron_pool.get_initialization_data()):
section.v = voltage
for section, voltage in zip(*descending_drive_pool.get_initialization_data()):
section.v = voltage
h.finitialize()
print("Running simulation...")
step_counter = 0
while h.t < h.tstop:
current_drive = drive_signal[min(step_counter, len(drive_signal) - 1)]
for dd_cell in descending_drive_pool:
if dd_cell.integrate(current_drive):
if h.t < h.tstop:
dd_netcons[dd_cell.pool__ID].event(h.t + 1)
h.fadvance()
step_counter += 1
print("Simulation complete!\n")
Running simulation...
Simulation complete!
Process Spike Trains#
dt_s = h.dt / 1000.0
mn_segment = Segment(name="Motor Neurons")
mn_segment.spiketrains = [
SpikeTrain(
recorder.as_numpy() / 1000 * pq.s,
t_stop=SIMULATION_TIME_MS / 1000 * pq.s,
sampling_rate=(1 / dt_s * (pq.Hz)),
sampling_period=dt_s * pq.s,
name=f"MN_{i}",
)
for i, recorder in enumerate(mn_spike_recorders)
]
spike_train__Block = Block(name="Motor Unit Pool")
spike_train__Block.segments = [mn_segment]
Calculate Firing Rate Statistics#
stats = calculate_firing_rate_statistics(mn_segment.spiketrains)
fr_mean = float(stats["FR_mean"])
fr_std = float(stats["FR_std"])
n_active = int(stats["n_active"])
print("Firing Rate Statistics:")
print(f" Active units: {n_active}/{N_MOTOR_UNITS} ({n_active / N_MOTOR_UNITS * 100:.1f}%)")
print(f" Mean firing rate: {fr_mean:.2f} Hz")
print(f" Std deviation: {fr_std:.2f} Hz")
print(f" Coefficient of variation: {fr_std / fr_mean:.3f}\n")
Firing Rate Statistics:
Active units: 374/800 (46.8%)
Mean firing rate: 5.79 Hz
Std deviation: 2.65 Hz
Coefficient of variation: 0.457
Generate Force Output#
- The ForceModel implements Fuglevand’s motor unit twitch model:
Each motor unit produces a twitch waveform: F(t) = P * (t/T) * exp(1 - t/T)
P (peak force) and T (contraction time) depend on recruitment threshold
Low-threshold units: small P, short T → small, fast twitches
High-threshold units: large P, long T → large, slow twitches
The force model convolves each unit’s twitch with its spike train, then sums across all units to get total muscle force.
force_model = ForceModel(
recruitment_thresholds=recruitment_thresholds,
recording_frequency__Hz=2048 * pq.Hz, # Output sampling rate
longest_duration_rise_time__ms=90.0 * pq.ms, # Slowest unit's rise time
contraction_time_range_factor=3, # Ratio of slowest/fastest T
)
# Generate force from spike trains
# Returns a NEO AnalogSignal with units of "arbitrary" (sum of normalized twitches)
force_output = force_model.generate_force(spike_train__Block=spike_train__Block)
force_raw = force_output.magnitude[:, 0] # Arbitrary units (sum of MU twitches)
force_time = force_output.times.rescale(pq.s).magnitude
# Normalize force to 0-1 range, then scale to Newtons
# (ForceModel outputs sum of MU twitch forces, not normalized values)
force_max_raw = np.max(force_raw)
force_signal = (force_raw / force_max_raw) * MAX_FORCE_N # Scale to Newtons
Pool 1 Twitch trains (Numba): 0%| | 0/800 [00:00<?, ?MU/s]
Pool 1 Twitch trains (Numba): 0%| | 1/800 [00:00<01:48, 7.33MU/s]
Pool 1 Twitch trains (Numba): 100%|██████████| 800/800 [00:00<00:00, 3911.56MU/s]
Analyze Force Characteristics#
# Use last 50% to avoid transients
steady_idx = len(force_signal) // 2
force_steady = force_signal[steady_idx:]
force_mean = np.mean(force_steady)
force_std = np.std(force_steady)
force_cov = force_std / force_mean
print(f"Reference Force Statistics ({DD_DRIVE_HZ:.1f} Hz constant drive):")
print(f" Mean force: {force_mean:.2f} N")
print(f" Std deviation: {force_std:.2f} N")
print(f" Coefficient of variation: {force_cov:.3f}")
print(f" Ripple amplitude: {(force_std / force_mean) * 100:.2f}%")
print(f" Peak normalized force: {np.max(force_signal):.2f} N (= MAX_FORCE_N)\n")
Reference Force Statistics (40.0 Hz constant drive):
Mean force: 64.83 N
Std deviation: 11.60 N
Coefficient of variation: 0.179
Ripple amplitude: 17.89%
Peak normalized force: 100.00 N (= MAX_FORCE_N)
Save Results#
force_results = {
"network_parameters": {
"n_motor_units": N_MOTOR_UNITS,
"dd_neurons": N_DD_NEURONS,
"dd_connectivity": DD_CONNECTIVITY,
"dd_drive__Hz": DD_DRIVE_HZ,
"synaptic_weight__uS": SYNAPTIC_WEIGHT,
"process_type": "poisson",
"poisson_batch_size": 1,
},
"force_scaling": {
"max_force__N": MAX_FORCE_N,
},
"firing_rate": {
"mean__Hz": fr_mean,
"std__Hz": fr_std,
"n_active": n_active,
"cov": fr_std / fr_mean,
},
"force": {
"mean__N": force_mean,
"std__N": force_std,
"cov": force_cov,
"ripple_percent": (force_std / force_mean) * 100,
},
}
results_file = RESULTS_DIR / "force_reference.json"
with open(results_file, "w") as f:
json.dump(force_results, f, indent=2)
print(f"Saved reference force results: {results_file}")
print(f"Reference drive: {DD_DRIVE_HZ:.1f} Hz constant")
print(f"\nNext step: Run 02_optimize_oscillating_dc.py to find DC offset for Phase 3")
Saved reference force results: /home/runner/work/MyoGen/MyoGen/examples/03_papers/watanabe/results/watanabe_optimization/force_reference.json
Reference drive: 40.0 Hz constant
Next step: Run 02_optimize_oscillating_dc.py to find DC offset for Phase 3
Visualize Results#
fig, axes = plt.subplots(3, 1, figsize=(14, 10), sharex=True)
# 1. Motor neuron raster plot (sample every 5th neuron for visibility)
sample_interval = 5
for i, spiketrain in enumerate(mn_segment.spiketrains):
if i % sample_interval == 0 and len(spiketrain) > 0:
spike_times = spiketrain.rescale(pq.s).magnitude
axes[0].scatter(spike_times, [i] * len(spike_times), s=0.5, alpha=0.6)
axes[0].set_ylabel("Motor Unit ID (sampled)")
axes[0].set_title(f"Motor Neuron Spike Trains ({n_active}/{N_MOTOR_UNITS} active)")
axes[0].set_ylim(-1, N_MOTOR_UNITS)
# 2. Force trace
axes[1].plot(force_time, force_signal, label="Force")
axes[1].axhline(force_mean, linestyle="--", label=f"Mean = {force_mean:.2f} N")
axes[1].fill_between(
force_time,
force_mean - force_std,
force_mean + force_std,
alpha=0.2,
label=f"SD = {force_std:.2f} N",
)
axes[1].set_ylabel("Force (N)")
axes[1].set_title(f"Reference Muscle Force (Ripple = {force_cov * 100:.1f}%)")
axes[1].legend(framealpha=1.0, edgecolor="none")
# 3. Firing rate distribution
firing_rates = []
mu_ids = []
for i, st in enumerate(mn_segment.spiketrains):
if len(st) > 2:
rate = len(st) / (SIMULATION_TIME_MS / 1000.0)
firing_rates.append(rate)
mu_ids.append(i)
if firing_rates:
# Distribution plot with all data points (Editor 8): violin shell for
# the density, box-and-whisker for the quartiles, jittered points for
# every active motor unit.
fr_array = np.asarray(firing_rates)
fr_sd = float(np.std(fr_array, ddof=1)) if fr_array.size > 1 else 0.0
if fr_array.size >= 10:
axes[2].violinplot(
fr_array, positions=[0], widths=0.7, showmeans=False, showmedians=False
)
axes[2].boxplot(
fr_array, positions=[0], widths=0.3, showfliers=False
)
jitter = np.random.default_rng(0).uniform(-0.15, 0.15, size=fr_array.size)
axes[2].scatter(jitter, fr_array, alpha=0.6, s=18, zorder=3)
axes[2].axhline(
fr_mean, linestyle="--", label=f"Mean = {fr_mean:.1f} Hz (SD = {fr_sd:.1f} Hz)"
)
axes[2].set_xticks([0])
axes[2].set_xticklabels([f"n = {fr_array.size}"])
axes[2].set_xlabel("Motor Units")
axes[2].set_ylabel("Firing Rate (Hz)")
axes[2].set_title("Firing Rate Distribution")
axes[2].legend(framealpha=1.0, edgecolor="none")
for ax in axes[:2]:
ax.set_xlim(0, SIMULATION_TIME_MS / 1000)
plt.tight_layout()
plt.savefig(RESULTS_DIR / "force_reference.png", dpi=150, bbox_inches="tight")
plt.show()
Total running time of the script: (1 minutes 22.349 seconds)