+
Open contribution
Your paper here?
Used MyoGen in your work? Open a pull request on GitHub to add it to this list.
Submit on GitHub ↗A closed-loop neuromuscular simulator that brings together descending cortical drive, spinal circuitry, proprioceptive feedback from spindles and Golgi tendon organs, Hill-type muscle dynamics, and decomposable high-density surface or intramuscular EMG in a single framework. Calibrated against human motor-unit discharge statistics.
MyoGen simulates the sensorimotor loop from descending drive to the signal at the electrode: NEURON α-motor neurons, Ia / II / Ib afferent pathways with spinal interneurons, muscle spindles and Golgi tendon organs, Hill-type muscle-tendon units, MU territories in a volume conductor, and decomposable surface or intramuscular EMG. Each stage is a standardised Neo object, swappable, and reproducible.
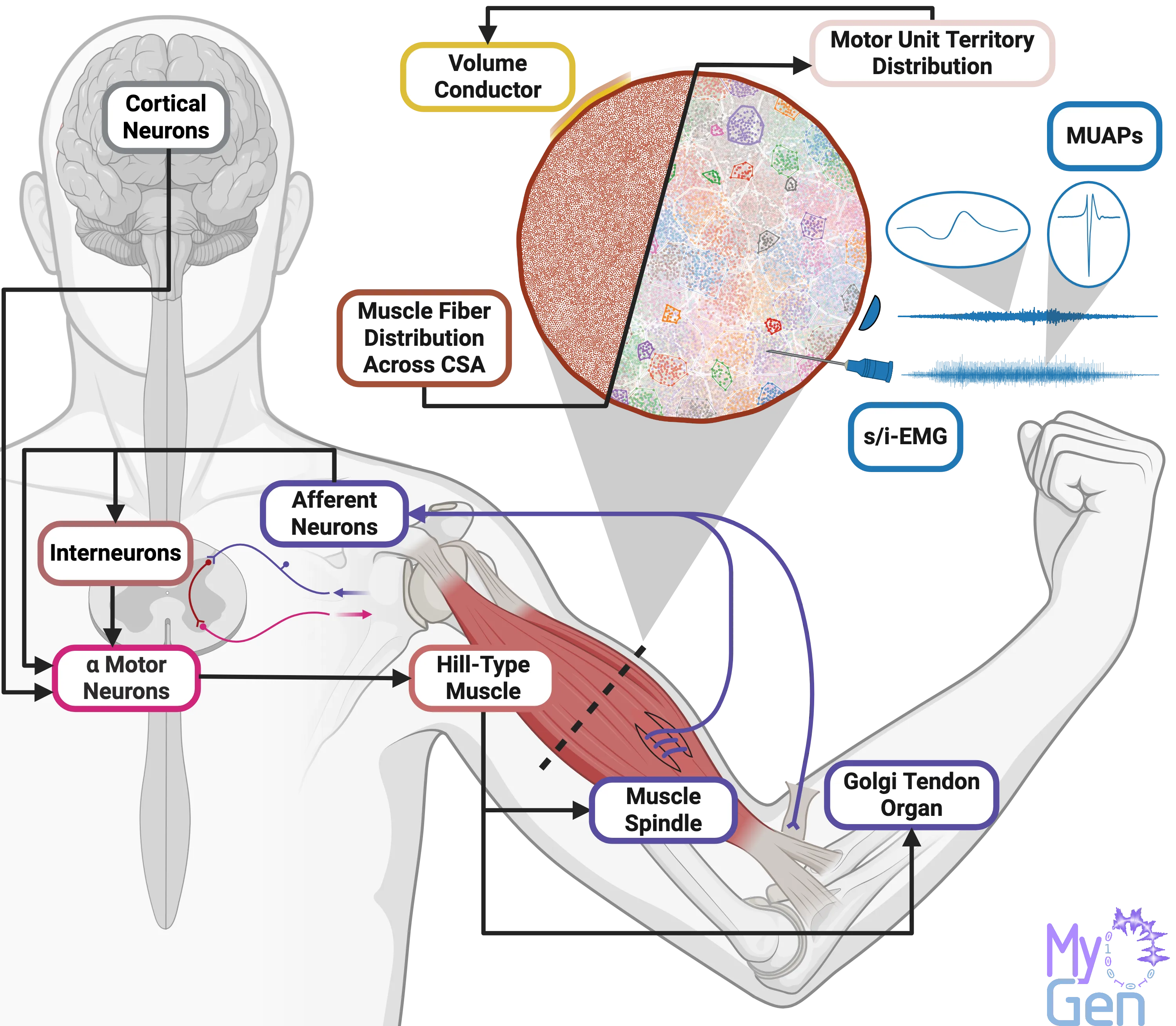
Cortical activity enters as a Poisson or Gamma point-process drive onto spinal interneurons and NEURON α-motor neurons with active dendrites; Ia, II, and Ib afferents close the loop.
Fibre distribution across the muscle CSA, motor-unit territories from a terminal-arborisation model, and Hill-type contractile dynamics.
Afferent neurons close the loop: spindles report stretch and velocity, Golgi tendon organs report force, both feeding back into the spinal circuit.
Per-fibre MUAPs propagate through the volume conductor to surface grids and intramuscular electrodes, ready for decomposition.
The documentation walks through installation, the Neo Block data model, and thirteen reproducible examples that progress from recruitment thresholds to HD-sEMG simulation and NWB export.
Preprints and publications that build on MyoGen for EMG decomposition, motor-control research, and neural-interface validation. New entries welcome via pull request.
Used MyoGen in your work? Open a pull request on GitHub to add it to this list.
Submit on GitHub ↗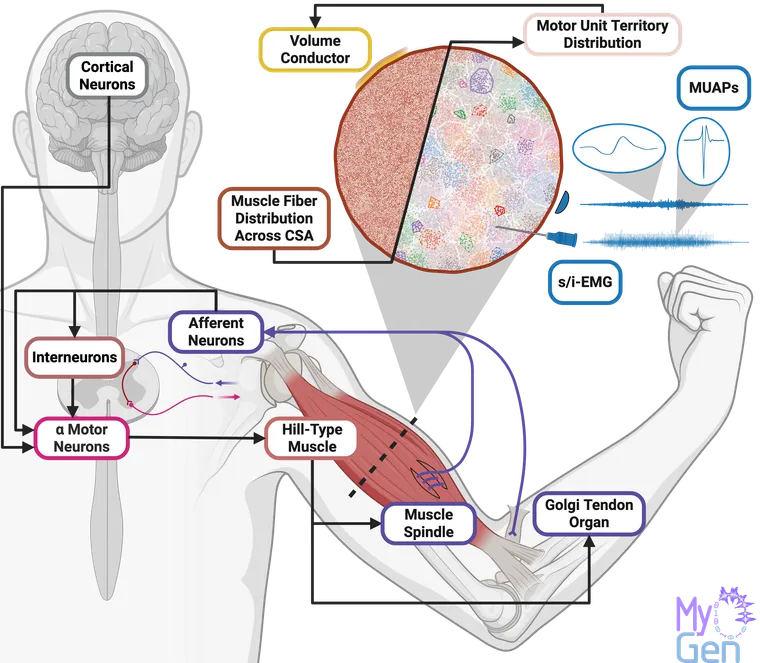
MyoGen is governed through two complementary bodies that separate scientific direction from operational maintenance. The goal is transparent stewardship and long-term sustainability, not authority.
The Council advises on physiological modelling assumptions, validation standards, interpretation of simulator outputs, the long-term scientific roadmap, and community relevance. It helps ensure that MyoGen remains physiologically grounded, scientifically credible, and useful to the wider neuromuscular modelling and EMG communities.
Technical limitations should never shape the scientific direction; instead, the Council guides technical development to meet the community's scientific needs.
Open to new scientific advisors.
The Maintainer Council is responsible for the operational development of MyoGen: code review, issue triage, releases, documentation, roadmap implementation, contributor onboarding, and technical decision-making.
It implements that guidance with full autonomy over the how. Priority goes to solutions that run on end-users' hardware for baseline accessibility; HPC and cloud support is secondary, considered where it enables large-scale use.
Bug reports, new physiological models, validation references, and pull requests are all welcome on GitHub. We welcome all contributions and depending on our availability and the nature of the contribution, we will do our best to provide feedback and guidance within a reasonable timeframe. We also encourage discussion on the GitHub Discussions page for more open-ended topics or proposals that may require community input before implementation.
New physiological models, alternate recruitment laws, or pipeline stages should be talked through before a PR.
Numerical instability, unexpected MUAP shapes, or NEURON compilation problems with a minimal reproducer.
Implement, test against the validation suite, and update the docs. CI runs the examples on every PR.
Citing both the bioRxiv preprint and the versioned Zenodo software archive attributes the science and pins the exact code release used. Both refs help us keep developing the framework in the open.
@article{simpetru_molinari_2026_myogen,
title = {MyoGen: Unified Biophysical Modeling
of Human Neuromotor Activity and
Resulting Signals},
author = {Sîmpetru, Raul C. and Molinari,
Ricardo G. and Rohlf, Devon R. and
Batichotti, Rebeka L. and Watanabe,
Renato N. and Elias, Leonardo A. and
Del Vecchio, Alessandro},
journal = {bioRxiv},
note = {preprint},
year = {2026},
doi = {10.64898/2026.01.01.697284}
} @software{myogen_software_2026,
title = {MyoGen: a modular and extensible
simulation toolkit for neurophysiology},
author = {Sîmpetru, Raul C. and Molinari,
Ricardo G. and {MyoGen contributors}},
year = {2026},
doi = {10.5281/zenodo.18078175},
url = {https://github.com/NsquaredLab/MyoGen}
}